Usted está aquí
La robótica en el espacio virtual
Implementacion de un ambiente b-learning para el aprendizaje de la robótica educativa en el instituto colombo sueco.

Autores
Andrés Arenas López
Jefe de Área de Tecnología e Informática
Instituto Colombo Sueco. Bogotá
[email protected]
Resumen
El proyecto “Robótica Educativa”, implementado en el Instituto Colombo Sueco (ICS) y originado en el trabajo de grado de la Especialización en Diseño de Ambientes de la Corporación Universitaria Minuto de Dios, tuvo como objetivo guiar a los estudiantes hacia la construcción de un robot insectoide, por medio del aprendizaje en un Entorno Virtual de Enseñanza-Aprendizaje, basado en el Modelo Pedagógico Holístico Transformador del Dr. Giovanni Iafrancesco y en el Modelo Instrucional Praddie.
A través de un modelo de B-Learning se afianzaron conceptos relacionados con la robótica educativa y se desarrollaron habilidades de trabajo cooperativo y aprehensión de nuevas tecnologías. Para conocer el impacto de la propuesta se aplicó una encuesta a 36 estudiantes de grado décimo.
Introducción
En el siglo XXI la tecnología ha tenido cambios muy importantes y significativos en el área de las Tecnologías de la Información y las Comunicaciones (TIC), que han trascendido a todos los campos de trabajo y a la vida misma del ser humano. Uno de los sectores más beneficiados es el educativo, pues gracias a estos avances en la actualidad es posible hablar de tres tipos de educación: presencial, virtual y el modelo mixto llamado B-Learning, dando así nuevas oportunidades de formación.
Como señala Domingo (2012), la utilización de las TIC en el sector educativo ha permitido ampliar el espectro de las herramientas empleadas en el proceso de enseñanza-aprendizaje, independientemente del área del conocimiento y en este sentido, tanto estudiantes como docentes han sido beneficiados y han adquirido nuevas responsabilidades.
En el marco de la Especialización en Diseño de Ambientes de la Corporación Universitaria Minuto de Dios nació el proyecto de grado Ambiente Virtual como Herramienta Didáctica para el Aprendizaje de la Robótica Educativa. Dicho proyecto fue desarrollado con los estudiantes del grado décimo del Instituto Colombo Sueco, durante el periodo 2012-2013. Se empleó la metodología del Modelo Holístico Transformador y paralelamente los estudiantes tomaron la asignatura de Tecnología (robótica) a través de un sistema de gestión de aprendizaje llamado Moodle.
Las nuevas corrientes pedagógicas y el avance de los medios de información privilegian la utilización de las TIC como herramientas de apoyo en las diferentes disciplinas del conocimiento, lo que conlleva a un aprendizaje más dinámico en los estudiantes. En este sentido, la construcción de un Entorno Virtual de Enseñanza-Aprendizaje (EVEA), permitió que el docente, educador-mediador, contara con una herramienta de apoyo que facilitó la construcción de un proyecto lúdico de robótica educativa para despertar la curiosidad, la creatividad y la innovación en los estudiantes. Ellos a su vez, aprendieron de manera dinámica conceptos de física, mecánica y electró- nica, proceso durante el que el docente supervisó el desempeño de los estudiantes con la metodología B-Learning (presencial y virtual). Aunque el B-Learning suple algunas de las dificultades del ELearning, porque apoya al estudiante con espacios presenciales, educarse a través de medios virtuales es difícil, aún para nativos digitales, ya que exige constancia y autonomía.
Este proyecto plantea una forma novedosa para enseñar robótica a estudiantes de educación media y al mismo tiempo permite trabajar con otras asignaturas de una manera interdisciplinaria para lograr así un aprendizaje significativo. La construcción de un Ambiente Virtual de Aprendizaje (AVA) facilita la comprensión de los conocimientos necesarios para el diseño y elaboración de los robots insectoides terrestres y brinda diferentes estrategias didácticas que orientan el proceso de enseñanza- aprendizaje.
Este proyecto también tiene en cuenta otros aspectos importantes como el hecho que los estudiantes trabajen en grupo y que los educandos puedan aplicar con eficiencia los conceptos teóricos en las clases presenciales para la construcción de los prototipos y adicionalmente se busca que estos recursos les sean útiles en la vida cotidiana.
Planteamiento del problema
Pregunta de investigación
Al diseñar y construir un Entorno Virtual de Enseñanza–Aprendizaje, mediante la plataforma Moodle, surgió la pregunta: ¿cuáles son las estrategias didácticas que se deben desarrollar para permitir la implementación de la robótica educativa, enfocada a la construcción de un robot “insectoide hexápodo”, en el grado dé- cimo del Instituto Colombo Sueco?
Objetivo General
Desarrollar e implementar un Entorno Virtual de Enseñanza-Aprendizaje como herramienta didáctica orientada a afianzar los procesos de formación en robótica educativa, para la construcción de un robot insectoide en los grados décimos de la institución educativa Instituto Colombo Sueco.
Objetivos Específicos
- Diseñar material didáctico que oriente el proceso de construcción de un robot insectoide terrestre, teniendo en cuenta el Modelo Holístico Transformador.
- Construir un Entorno Virtual de Ense- ñanza Aprendizaje (EVEA), que oriente los conceptos básicos de robótica educativa, mecánica y electrónica en la construcción del robot insectoide hexápodo.
- Aplicar una encuesta piloto con los estudiantes de grado décimo del Instituto Colombo Sueco, para identificar el impacto en el proceso de aprendizaje de los conceptos de las distintas fases propuestas para el proyecto de robótica educativa.
Fundamentación teórica
En el diseño del Entorno Virtual de Enseñanza se tuvo en cuenta un modelo pedagógico y un modelo instruccional.
Modelo pedagógico: De acuerdo con Iafrancesco (2011), el propósito del Modelo Pedagógico Holístico de Escuela Transformadora es formar integralmente al educando, desde su singularidad, logrando una madurez integral de sus procesos y dimensiones, para que construya su conocimiento desde la investigación y la innovación educativa.
El papel del “educador-mediador” dentro del Modelo Pedagógico Holístico Transformador debe ser orientar los procesos de formación del educando frente a las distintas disciplinas del conocimiento y formar seres integrales (aprender a vivir, aprender a aprender, aprender a convivir) con valores cimentados. Además el mediador debe ser proactivo y creativo en la búsqueda de nuevas estrategias pedagógicas, didácticas y tecnológicas, que conlleven a un aprendizaje significativo. Ahora bien, desde este modelo pedagógico el educando es un líder emprendedor que construye su propio conocimiento, es colaborativo y participa activamente en cada una de las actividades propuestas por el educador mediador.
Modelo Praddie: Un modelo instruccional es un conjunto de guías y estrategias en las que se fundamentan los enfoques de aprendizaje orientados por instructores, basado en teorías de aprendizaje. El modelo Praddie es una evolución del Modelo Clásico de desarrollo de sistemas ADDIE, al que Cookson (2003) agrega la etapa de pre-análisis, y le añade un carácter sisté- mico. El Modelo Praddie puede aplicarse a cualquier situación instruccional, que en este caso es un EVEA, y contempla las siguientes seis etapas: pre-análisis, aná- lisis, diseño, desarrollo, implementación y evaluación.
El Entorno Virtual de Enseñanza-Aprendizaje, según Bautista, Borges y Forés (2006), se define como un espacio de formación que proporciona flexibilidad al educando, permitiéndole estudiar en cualquier momento y desde cualquier lugar mientras tenga acceso a un computador y a Internet; lo anterior soportado en herramientas Web 2.0, entre las cuales encontramos el LMS Moodle. Según los autores, el EVEA está compuesto por 5 elementos principales: el entorno, el estudiante, el docente, los contenidos educativos y los recursos de información y comunicación.
La plataforma virtual
Se eligió Moodle por ser una plataforma de software libre. Como señala Sánchez (2009), Moodle es un sistema de gestión de aprendizaje (LMS, Learning Management Sytem) cuyas aplicaciones son utilizadas para diseñar y administrar plataformas educativas, es decir, Entornos Virtuales de Enseñanza–Aprendizaje.
Robótica educativa
Sintetizando la postura de Yolanda Campos (1999), la robótica educativa permite una visión directa de los fenómenos reales que se presentan en el entorno cotidiano del ser humano a través de modelos gráficos y simbólicos. Esto quiere decir que la robótica es una ciencia que aporta diferentes adelantos tecnológicos a varias disciplinas como: la ingeniería, la biología y la medicina entre otras, contribuyendo a mejorar la calidad de vida del ser humano.
Según Acuña (2009), “la robótica es propicia para apoyar habilidades productivas, creativas, digitales y comunicativas y se convierte en un motor de innovación cuando produce cambios en las ideas y pensamientos en los estudiantes y educadores”. En la robótica se combinan varias disciplinas como la mecánica, la electrónica, la informática y la ingeniería de control. Por tanto, es importante el aporte que recibe y extrae de campos tales como el álgebra, los autómatas programables y también de las máquinas de estados.
Salido (2009), define los robots educativos como réplicas a escala reducida. Esta clase de robots se emplean principalmente como herramientas de aprendizaje e investigación en centros educativos. Estos prototipos de robots suelen incluir tareas de exploración y rastreo.
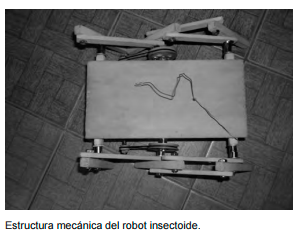
En palabras de Barrientos, Peñis y Aracil (1997), un prototipo robótico está conformado por los siguientes elementos: estructura mecánica, transmisiones, sistema de acondicionamiento, sistema sensorial, sistema de control y elementos terminales. En el caso del proyecto que se adelantó en el Instituto Colombo Sueco se determinó la construcción de un robot insectoide hexápodo en cuatro fases: investigación, estructura mecánica, eléctrica y diseño final.
La estructura mecánica del robot hexá- podo está conformada por una serie de operadores mecánicos (poleas y piñones, entre otros), acoplados entre sí, cuya función principal es generar movimiento.
Según Salido (2009), la forma de locomoción terrestre predominante en la naturaleza es el empleo de patas. Las patas proporcionan gran maniobrabilidad, capacidad de alcanzar grandes velocidades y posibilidad de desplazamiento en terrenos irregulares.
La parte electrónica del robot corresponde a un sistema de control, que trabaja con mando. Un convertidor digital análogo transforma la señal digital del controlador en una señal análoga para accionar los actuadores (Barrientos, et al., 2008). En el caso del prototipo robótico, una señal digital se transfiere a un motor paso a paso que genera el movimiento del robot insectoide.
Marco metodológico
Tipo de investigación
El proyecto se fundamenta en el marco de una metodología mixta de corte descriptivo, es decir, se proponen dos partes: la primera tiene que ver con el desarrollo de un Ambiente Virtual de Enseñanza-Aprendizaje y la segunda es una aplicación práctica en la que se construye un prototipo. Siguiendo a Tamayo (2002), la investigación descriptiva trabaja sobre realidades de hecho y su principal fundamento es mostrar una interpretación correcta de la naturaleza, en este caso la simulación del movimiento del animal.
 Aprendizaje B-Learning
Aprendizaje B-Learning
La investigación planteada estuvo orientada desde un aprendizaje combinado (B-Learning), donde se trabajó la conceptualización teórica de la robótica y el desarrollo de talleres y evaluaciones propuestos por el educador-mediador a partir de un Entorno Virtual de Aprendizaje. La parte presencial permitió el proceso de construcción del robot hexá- podo en cuanto a su estructura mecánica y electrónica.
Estructura del entorno virtual: Como se describió anteriormente, este proyecto contó con un entorno virtual construido en la plataforma Moodle, en donde los educandos estudiaban los contenidos y desarrollaban los trabajos propuestos en cuatro módulos. Cada módulo dise- ñado e implementado de manera virtual estaba conformado por los siguientes elementos: bienvenida, cronograma de actividades, contenidos, recursos, foros de equipos, talleres y evaluación.
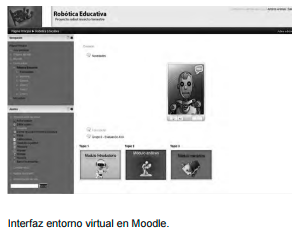 El primer módulo denominado Introductorio, presenta un cronograma general sobre las actividades propuestas en cada sección; contiene un mapa mental sobre los conceptos que se trabajan en el transcurso de cada módulo; y finalmente, muestra el perfil del docente encargado de orientar el proceso de acompañamiento en el entorno virtual. Este módulo fue diseñado con un software de auditoria de contenidos llamado Articulate.
El primer módulo denominado Introductorio, presenta un cronograma general sobre las actividades propuestas en cada sección; contiene un mapa mental sobre los conceptos que se trabajan en el transcurso de cada módulo; y finalmente, muestra el perfil del docente encargado de orientar el proceso de acompañamiento en el entorno virtual. Este módulo fue diseñado con un software de auditoria de contenidos llamado Articulate.
Por otro lado, el módulo de investigación está orientado a la conceptualización de la robótica educativa y sus características. Es por ello que los materiales de este módulo en gran medida están dirigidos a la selección del modelo de insecto terrestre, y fue implementado con la aplicación llamada Exe Learning, que permite la creación de contenidos educativos On-line. Las actividades propuestas para este módulo fueron: desarrollo de mapas conceptuales y presentaciones elaboradas en aplicaciones como Power Point y Prezi, videos tutoriales enfocados al manejo de los foros en Moodle (esta ayuda visual se creó con la aplicación de Camtasia Studio) con el fin de estimular en el estudiante que aprenda a trabajar colaborativamente en cada una de las actividades propuestas por el docente; y una evaluación en la cual se examinan los conocimientos aprendidos. Cabe aclarar, que esta evaluación fue implementada con un recurso disponible en la plataforma Moodle.
En el tercer módulo titulado Mecánica, se expone la fundamentación teórica de la mecánica en los robots insectoides. Este material propuesto se diseñó con la aplicación de Course Lab y fue empaquetado en un bloque de material web también conocido como Scorm para ser insertado en el Entorno Virtual de Ense- ñanza-Aprendizaje (EVEA). Asimismo en el módulo se presenta una guía para el proceso de construcción de la estructura mecánica del robot hexápodo.
Las actividades asignadas en este módulo estuvieron encaminadas a estimular el pensamiento y la redacción en los estudiantes. Por ello se formuló la presentación de un mapa mental utilizando el software libre de FreeMind y la producción de un ensayo. Para terminar este módulo, se diseñó una encuesta en línea aplicada a los estudiantes cuyo objetivo fue la evaluación de los contenidos, talleres, recursos y acompañamiento del docente en el aula virtual.
Finalmente, el módulo de electrónica presenta material relacionado con el manejo de componentes electrónicos para la construcción de un circuito seguidor de luz, ensamblado con la parte mecánica del robot hexápodo. Siguiendo el postulado del Modelo Pedagógico Holístico Transformador, se propone una actividad que fomente la construcción del conocimiento, la creatividad y la autonomía, que consiste en realizar una historieta sobre los conceptos aprendidos en el módulo, usando una herramienta web llamada Bitstrips for Schools. En esta sección se contó con el recurso del chat para despejar cualquier inquietud sobre algún concepto o sobre el manejo de alguna aplicación.
Hasta ahora se ha hecho una descripción de lo relacionado con “aprendizaje virtual”. A continuación se presenta la fase presencial o práctica del curso que contiene los siguientes espacios: medios de locomoción natural, laboratorio de mecánica, electrónica, diseño y elaboración.
Medios de locomoción: En esta fase los estudiantes indagan acerca de los tipos de movimiento y morfología de los insectos terrestres para seleccionar el prototipo robótico a construir. Un aspecto relevante, evaluado en el transcurso del proceso de búsqueda de información, es la habilidad que tienen los estudiantes frente al manejo de los diferentes tipos de software que utilizan para presentar sus trabajos en los tiempos acordados.
Laboratorio de mecánica: Esta fase es de vital importancia en la construcción del insectoide hexápodo ya que en ella se debe hacer un diseño que de estabilidad y firmeza al robot. Por esta razón es necesario seleccionar los materiales y mecanismos más adecuados. Entre los mecanismos que se deben tener en cuenta para la construcción del chasis y las patas están poleas, piñones, sinfines y motores.
Laboratorio de electrónica: En este espacio los estudiantes deben construir un circuito llamado “seguidor de luz” cuya finalidad es dirigir el desplazamiento del robot insectoide hexápodo a partir de la localización de un rayo de luz. Por esta razón, con la ayuda del módulo Electró- nica, diseñado en el aula virtual, y los laboratorios donde el docente explicó el funcionamiento de los diferentes dispositivos electrónicos, los estudiantes adquieren las competencias procedimentales y conceptuales que lleven a la construcción del robot por medio de un aprendizaje colaborativo.
Diseño y elaboración: Este espacio tiene que ver con los materiales que se van a utilizar en la decoración y acabado del robot, con el fin de darle un aspecto similar al del insecto y poder presentar un prototipo ajustado a las características del animal.
Población estudiada
La población beneficiada con este proyecto estuvo conformada por 79 niños y 71 niñas para un total de 150 estudiantes, repartidos en 4 cursos de grado décimo de educación básica del Instituto Colombo Sueco, del sector nororiental de la ciudad, localidad 1 – Usaquén de Bogotá, Colombia. Todos adolescentes, entre 14 y 17 años de edad. La muestra seleccionada para evaluar la investigación fue de 36 estudiantes, 18 niños y 18 niñas, del grado 1004.
Recolección de datos: Atendiendo al carácter mixto de la investigación de tipo descriptivo, se utilizaron como instrumentos de recolección de datos: entrevistas, encuestas en línea y la observación de los estudiantes durante las actividades realizadas de manera presencial y virtual.
Entrevistas: Se aplicaron dos entrevistas. Una de ellas se realizó a un grupo de seis estudiantes del grado 1004 y otra al docente de tecnología de cuarta etapa del Instituto Colombo Sueco. En ellas plasmaron la opinión personal de su vivencia respecto al trabajo en un aula virtual y los materiales diseñados e implementados para la construcción del insecto terrestre.
Encuestas: Fueron realizadas a través de la plataforma Moodle, donde se creó un cuestionario para 12 estudiantes del grado 1004 con la ayuda del software on-line Encuestatick. En las encuestas se plantearon diferentes preguntas de carácter cerrado enfocadas a la evaluación del diseño del aula virtual, de los contenidos propuestos y del aprendizaje en cuanto a la conceptualización de mecánica y electrónica. Cabe aclarar que este instrumento se contestó de manera anónima.
Observación: El proceso de observación se basó en la interpretación de la ruta de aprendizaje diseñada para la construcción de la parte mecánica del robot hexá- podo y el trabajo colaborativo realizado en las actividades virtuales propuestas para ser desarrolladas en grupo.
Análisis e interpretación de datos
En la investigación desarrollada en el Instituto Colombo Sueco, se realizó una encuesta a 12 estudiantes del grupo muestra. Después de analizar e interpretar detenidamente las respuestas obtenidas, se llegó a las siguientes conclusiones sobre la experiencia de trabajar en Entornos Virtuales de Ense- ñanza-Aprendizaje:
- A los estudiantes de tecnología en un porcentaje alto les ha gustado trabajar en el aula virtual de robótica por ser un espacio flexible para el estudio de contenidos y entrega de trabajos. Por otra parte, es una herramienta que permite generar nuevos espacios de aprendizaje y rompe con los esquemas tradicionales del aula de clase presencial.
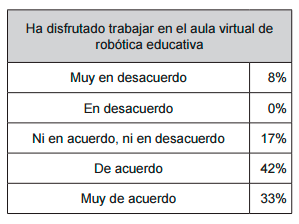
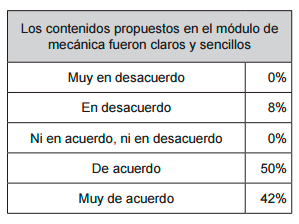
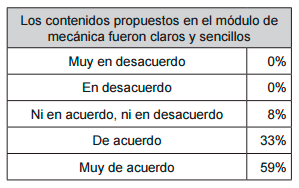
Resultado de la encuesta
- La gran mayoría de los estudiantes encontró claros y sencillos los contenidos del módulo de mecánica para ser estudiados. La ruta de aprendizaje elaborada para la construcción de la estructura mecánica orientó de manera sencilla el proceso de construcción.
- El 92 % de los encuestados coincidió en que las imágenes y efectos utilizados fueron estrategias visuales adecuadas para ayudar a entender de manera clara los contenidos, generando motivación e interés para el estudio de ellos.
Una de las entrevistas mencionadas anteriormente, se realizó a un grupo de estudiantes y otra a un docente del área de tecnología. Las entrevistas fueron grabadas para su posterior análisis. En ellas se preguntó sobre la experiencia al trabajar en Entornos Virtuales de Enseñanza-Aprendizaje y sobre el material propuesto en el aula virtual. Las respuestas obtenidas fueron las siguientes:
- El docente considera que los Entornos Virtuales de Enseñanza-Aprendizaje son espacios dinámicos y permiten fomentar el trabajo colaborativo, además de ser una experiencia innovadora en los estudiantes de grado décimo.
- El docente entrevistado considera que el proyecto de robótica educativa, manejado desde un entorno virtual, es interdisciplinario con otras áreas del conocimiento (física, biología, español, inglés), logrando así un aprendizaje significativo. Además, considera que los contenidos diseñados fueron apropiados con las temáticas dadas en cada uno de los módulos.
- Los estudiantes creen que trabajar en Entornos Virtuales abre espacios para interactuar con los compañeros colaborativamente. Por otra parte, aprenden el manejo de aplicaciones informáticas, como CmapTools, FreeMind o Prezi, orientadas a la construcción de mapas conceptuales o mentales y elaboración de presentaciones.
- Las actividades propuestas en el aula virtual generaron espacios de investigación propiciando un aprendizaje significativo. Lo anterior conllevó a que el docente cambiara su rol tradicional y se transformara en un “orientador” como nos propone la Escuela Transformadora.
Después de observar el desarrollo de la fase mecánica y electrónica ,e interactuar constantemente con los estudiantes, se comprobó que los espacios académicos establecidos para trabajar de manera presencial y virtual (B-Learning) permitieron cumplir con los postulados de la robótica educativa y sirvieron para crear hábitos, mejorar el aprovechamiento del tiempo libre y motivar la creatividad de estudiantes y docentes, permitiendo así salir de la rutina tradicional de aprendizaje, limitada a una cátedra o al desarrollo de una guía.
La dificultad más relevante que se evidenció por parte de los estudiantes fue el desánimo frente a la utilización del aula virtual, mientras exploraban el entorno y aprendían a manejar los diferentes recursos de la plataforma, pero cuando se familiarizaron con ella y le vieron sentido a estudiar de manera autónoma, ocurrió un cambio positivo, ya que pudieron manejar sus espacios e interrelacionarse de manera constante con su docente y con sus compañeros.
Otra problema que se observó fue la dificultad en la manipulación de los diferentes materiales y herramientas para la construcción de la parte mecánica y electrónica que tenían ciertos estudiantes.Para subsanar esta dificultad se diseñaron unos talleres teórico-prácticos enfocados al manejo de las herramientas eléctricas y de corte.
Conclusiones
Tras implementar el Entorno Virtual de Enseñanza-Aprendizaje en la clase de Tecnología, se concluyó que:
Emplear metodología B-Learning tiene buena aceptación en los estudiantes de educación media, siempre y cuando se diseñen contenidos claros, sencillos y actividades acordes con sus intereses y motivaciones. Además, la utilización del modelo B-Learning permitió la interdisciplinariedad, el compromiso con los trabajos del grupo, la identificación de talentos, el desarrollo de la creatividad y el aprovechamiento de los recursos de las TIC. Lo más valioso fue la satisfacción de los jóvenes al momento de resolver un problema real y poder superar las adversidades. Por otra parte, la utilización de los foros grupales en plataformas virtuales propició el trabajo cooperativo en los estudiantes llevando a la construcción de un conocimiento autónomo.
Finalmente, es importante resaltar que el aula virtual permitió la comprensión lectora y la libre expresión de las ideas, utilizando el recurso del foro, además que los proyectos B-Learning permiten un aprendizaje significativo debido al apoyo brindado por el “educador-mediador” dentro y fuera de la clase.
Perspectiva
El desarrollo e implementación del Entorno Virtual de Aprendizaje de Robótica educativa originó un impacto en la comunidad de educandos a tal punto que algunas áreas del conocimiento, como matemáticas y contabilidad, quieren tomar como referente el campus virtual para diseñar sus ambientes de aprendizaje para el estudio de contenidos y presentación de diferentes actividades como talleres, foros y evaluaciones. Es necesario cambiar los actuales paradigmas de aprendizaje y utilizar los EVEA como herramientas de apoyo en nuestras aulas de clases.
Agradecimientos
El presente proyecto de investigación fue realizado bajo la supervisión de la Coordinadora Académica Esperanza Ñungo y del Dr. Rafael Garavito Garavito Rector del Instituto Colombo Sueco, a quienes expreso mis sinceros agradecimientos por haber hecho posible esta investigación.
Agradezco a mis co-investigadoras Elizabeth Triana de Cadena y Viviana Molano por sus aportes en el proyecto implementado desde un Entorno Virtual de Enseñanza-Aprendiza (EVEA).
Al docente John Fabio Gómez y a todos los docentes del área de Tecnología e Informática del Instituto Colombo Sueco, quienes apoyaron y participaron activamente para poder desarrollar el trabajo. De manera muy especial agradezco al docente Fabián Bermúdez Yanet por su valioso aporte en la redacción del presente artículo.
Para finalizar se quiere dejar esta reflexión: DIOS nos acerca a la ciencia y tecnología para que esté al servicio del ser humano.
Referencias bibliogaficas
Acuña, A. L. (2009). Proyecto de Robótica Educativa: Motores para la innovación. Current Developments in Tecnology-Assisted Education. Recuperado de: www.fod.ac.cr/robotica/descargas/ roboteca/articulos/2009/motorinnova_corto.pdf Última consulta: Junio de 2012.
Barrientos, A. Peñin, L. Balaguer C. y Aracil R. (2008). Fundamentos de robótica. Madrid, España: McGraw-Hill.
Bautista, G. Borges, F. y Forés, A. (2006). Didáctica Universitaria en Entornos Virtuales de EnseñanzaAprendizaje. Madrid, España: Editorial Narcea, S.A.
Campos, Y. (1999). Estrategias didácticas apoyadas en tecnologías.Recuperado de: bibliotecadigital.conevyt.org.mx/colecciones/documentos/ somece/77.pdf Última consulta: junio de 2012
Belloch, C. Las tecnologías de la información y comunicación (TIC) en el aprendizaje. Consultado en: http://www.uv.es/bellochc/pdf/pwtic2.pdf. Última consulta: Mayo de 2012
Cookson, P. (2003). Elementos de diseño instruccional para el aprendizaje significativo en la educación a distancia. Recuperado de: http://cvonline.uaeh. edu.mx/Cursos/Especialidad/TecnologiaEducativaG12/Modulo03/PDF/ESTEM03T04I03.pdf. Última consulta: Recuperado el 12 de marzo de 2013.
Domingo, J. (2012). Las TIC en geometría. Bogotá, Colombia: Editorial Ediciones de la U.
Iafrancesco, G. (2011). Modelo Pedagógico Holístico Transformador. Bogotá: Editorial. Coripet.
Salido, J.T. (2009). Cibernética Aplicada: Robots Educativos. México: Alfaomega.
Sánchez, I. (2009). Plataforma educativa Moodle Administración y Gestión. México: Editorial Alfaomega.
Tamayo, M. (2002). El proceso de la investigación científica. México: Editorial Limusa.

Este documento fue tomado de www.revistaelastrolabio.com

- 1166 lecturas

